英國利茲大學工程師開發了一款創新性的微型磁性機器人。它能在人體内深處執行3D掃描進行“虛拟活檢”,并首次從胃腸道或腸道深處獲取了高分辨率3D超聲圖像,這标志着早期癌症檢測技術的重大突破。相關研究成果26日發表在《科學·機器人學》雜志上。
該機器人實現的“虛拟活檢”,無需侵入性操作即可獲得診斷數據,使得醫生能夠在單一程序中完成病變的檢測、分期乃至潛在治療。這一進展爲多種癌症的診斷和治療帶來了革命性變化。
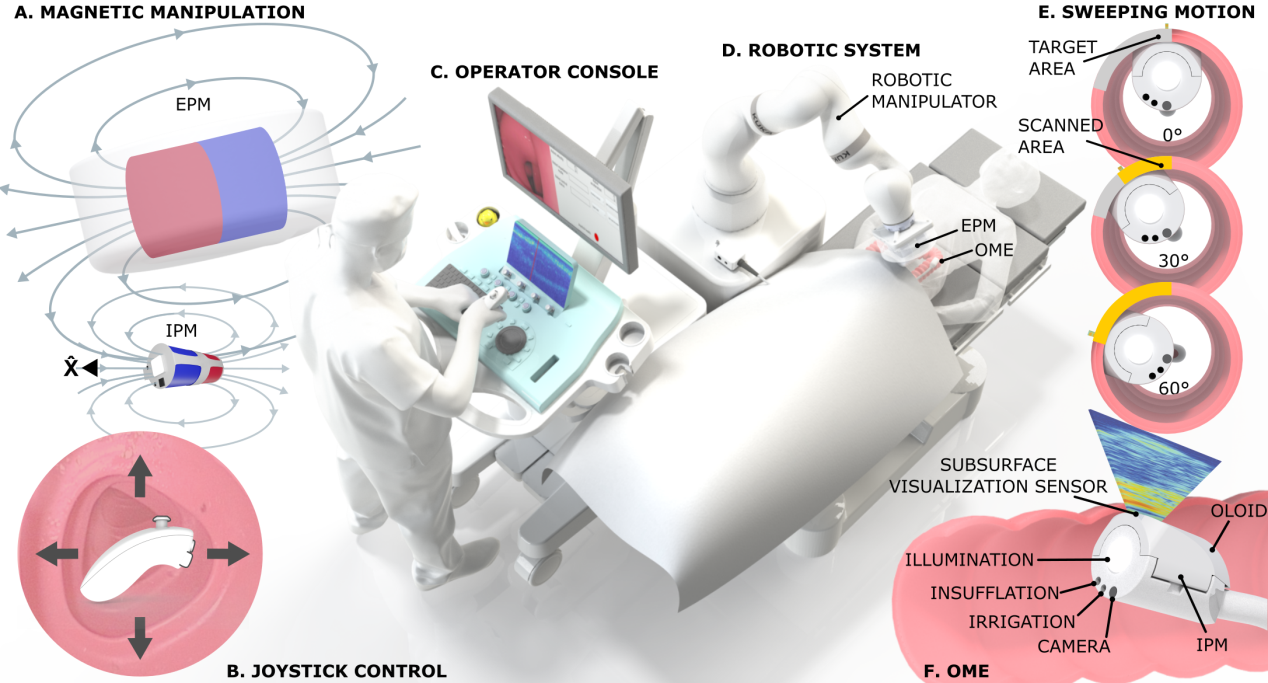
研究團隊采用一種名爲oloid的3D幾何形狀賦予了磁性醫療機器人前所未有的運動範圍,包括滾動動作,這對于體内精确導航與成像是至關重要的。團隊将oloid形狀及其獨特的滾動能力整合到一種新型的磁性柔性内窺鏡中,并配備了一個小型高頻成像裝置,用于捕捉内部組織的詳細3D圖像。
這項技術首次讓科學家能夠重建來自腸道深處探針拍攝的3D超聲圖像,支持對結直腸癌進行原位組織分析與診斷,并立即得出結果。傳統方法需要1到3周才能得到實驗室結果,而新方法消除了診斷與治療之間的等待時間,不僅提高了患者的舒适度,還減少了重複手術的需求,減輕了患者對潛在癌症診斷結果的焦慮。
該成像設備包含一個28MHz的微超聲陣列,能夠對其掃描區域進行高分辨率3D重建,讓臨床醫生可以生成類似于标準活檢産生的橫截面圖像。此外,高頻/分辨率超聲探頭讓用戶能在微觀層面觀察特征,直至組織層的細節。
該内窺鏡使用樹脂3D打印而成,直徑僅爲21毫米,适用于結腸鏡檢查等實際臨床應用。團隊已經在模拟的人體結腸、食道及胃結構上測試了此系統,并進一步在人工結腸模型以及豬身上進行了實驗,以符合醫療器械審批的監管要求。